
RC Diary; day 1
I decided to try something new, and since it’s actually pretty challenging, write down my findings a bit so it might help someone else one day.
I’m trying 2 things;
- Learning to fly a micro quadcopter; a Walkera QR Ladybird V2 FPV (with a Devo F4 transmitter)
- Learning to build and fly ‘foamie’ rc planes, following Flitetest.com’s ‘swappable scratchbuild’
I received the quadcopter yesterday. It’s clear this stuff is definitely not a toy, the Devo F4 transmitter (tx) is a pretty complicated device by itself already.
So my first thoughts after flying it;
It is super-sensitive! The slightest input sends it flying, resulting in numerous crashes indoor. On the 8th or so I broke the motor mount from a 2m high crash and fall.
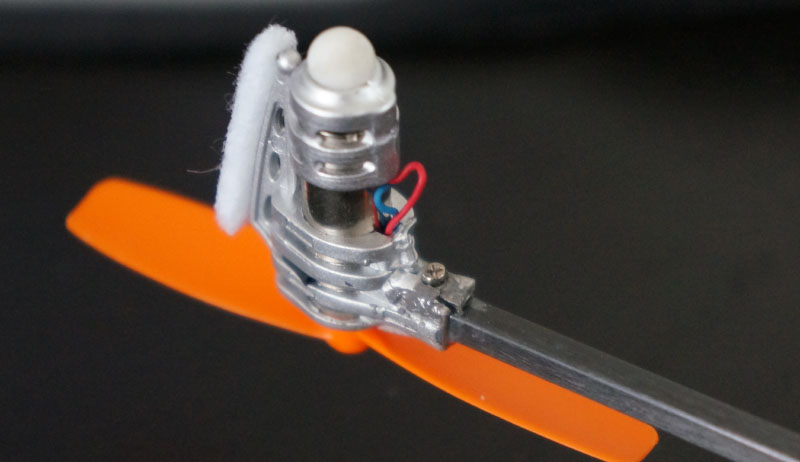 Above you see I glued it with JB-weld, I might put a tie-wrap around it as well. I think one of the front booms is split too, I might try replacing it by a metal one if the weight is acceptable.
Above you see I glued it with JB-weld, I might put a tie-wrap around it as well. I think one of the front booms is split too, I might try replacing it by a metal one if the weight is acceptable.
After fixing that, the quad would spin(yaw) around madly. I really had no idea what could have caused it; perhaps a weight imbalance, a twisted boom or a mis-aligned motor. Eventually I found out by reading online a bit; Clock-wise and Counter-clock-wise motors sit diagonally aligned with each other. Yaw is achieved by having either the CW or CCW motors speed up and take over from the other ones.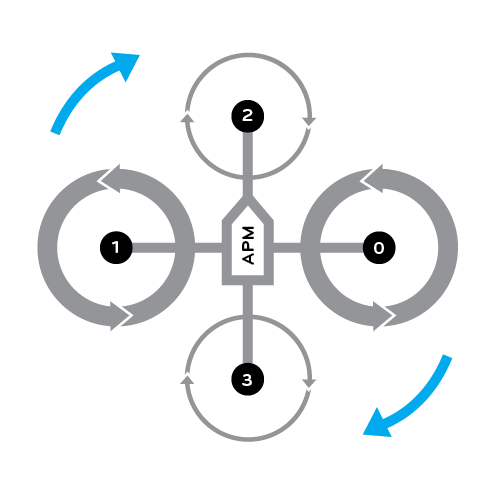
I had accidentally swapped out the two tail booms, messing up the CW-CCW alignment.
Another thing I learned from reading online, is that you can adjust the ‘rates’ in the Devo F4 Tx. This was never explained or mentioned clearly in the manual. But it can be accessed though Menu > Function Menu > Dual Rate. There you can set the maximum possible input, making the whole thing a lot less sensitive; it really makes a difference. Recommended in Rams’ topic on RC groups is around 20% compared to the original 100% The idea is to set up two-sets (hence the dual) of sensitivity setups, 20 for indoor, 55 for outdoor. Once you get better, you increase this. At least i hope so…
Additionally, I have barely bothered with the FPV stuff as learning to fly is hard enough by itself, and staring down at the screen is pretty difficult if you don’t master the controls. Perhaps I should’ve bought a non-FPV version to start with, though that comes with a much simpler controller that doesn’t seem to allow dual-rate… I’m thinking FPV without goggles might be too difficult, so I’m thinking about getting Fatshark goggles; cheap Teleporters or expensive Attitudes, i don’t know yet.
Additionally I ordered a slightly better antenna and lens as recommended by Ramsey in his topic; the default FOV on the camera is pretty tight, too tight to get a lot of awareness I think. The range is also supposedly not great with the default antennas.
That’s it for now!